论文地址:https://arxiv.org/pdf/2203.11139.pdf
开源代码:https://github.com/yifanzhang713/IA-SSD
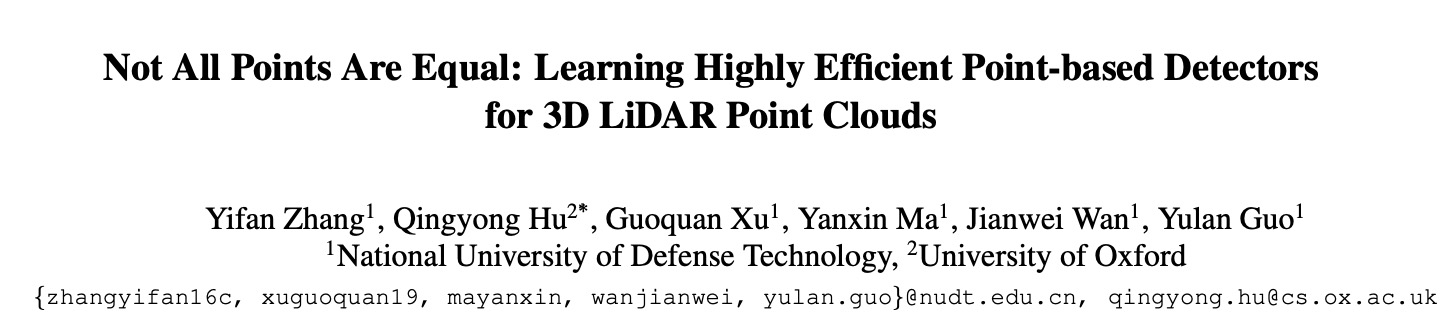
论文主要贡献论文针对三维激光雷达点云的有效目标检测问题开展了研究,为了减少内存和计算成本,现有的基于point的pipeline通常采用任务无关随机采样或最远点采样来逐步向下采样输入pointset,然而并非所有点对目标检测任务都同等重要。对于detector来说,前景点本质上比背景点更重要。基于此,论文提出了一种高效的单级基于point的3D目标检测器,称为IA-SSD。
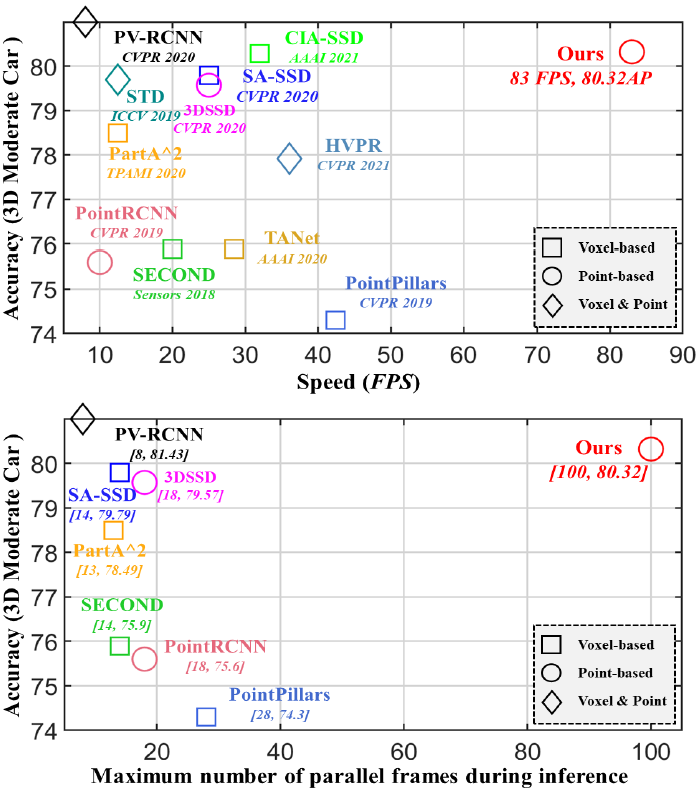
IA-SSD利用两种可学习的,面向任务、实例感知的下采样策略来分层选择属于感兴趣对象的前景点。此外,还引入了上下文质心感知模块,以进一步估计精确的实例中心。最后,为了提高效率,论文按照纯编码器架构构建了IA-SSD。在多个大规模检测benckmark上进行的实验证明了IA-SSD的优势。由于低内存占用和高度并行性,在KITTI数据集上单个RTX2080Ti GPU实现了每秒80多帧的速度。
 面临的一些问题
面临的一些问题由于复杂的几何结构和不均匀的密度,激光雷达点云中的三维物体检测任务(即预测7自由度的三维box框,包括三维位置、三维尺寸、方向和类别标签)仍然极具挑战性。由于三维点云的非结构化和无序性质,早期的工作通常首先将原始点云转换为中间规则表示,包括将三维点云投影到鸟瞰视图或正面视图的二维图像,或转换为密集的三维体素。然后,可以2D检测范式网络部署到3D目标检测任务中,尽管最近取得了显著进展,但由于3D-2D投影或体素化引入了量化误差,不可避免地限制了现有方法的性能。另一种技术流遵循基于点的pipeline,直接对原始点云进行操作,通常直接学习逐点特征,然后通过特定的对称函数进行聚合,如max-pooling。
虽然这些方法很不错,并且没有任何显式信息丢失,但仍然存在昂贵的计算/内存成本和有限的检测性能。